 가이드와이어 부착형 마이크로로봇을 개발한 DGIST 로봇공학전공 최홍수 교수(가운데)와 박사과정 전성웅씨, 석사과정 김강호 씨.
가이드와이어 부착형 마이크로로봇을 개발한 DGIST 로봇공학전공 최홍수 교수(가운데)와 박사과정 전성웅씨, 석사과정 김강호 씨.
복잡한 혈관 내에서 원하는 방향으로 조향(操向)과 이동이 가능해 만성완전폐쇄병변과 같은 심혈관 질환이 발생한 부위까지 정확하게 도달할 수 있는 마이크로로봇이 개발됐다.
DGIST는 로봇공학전공 최홍수 교수팀이 한양대 이병주 교수팀, 스위스취리히연방공대(ETH) 브래들리 넬슨 교수팀과의 공동연구를 통해 심근경색 가운데 만성완전폐쇄병변의 치료 성공률을 향상시킬 수 있는 ‘가이드와이어 부착형 마이크로로봇’을 개발했다고 27일 밝혔다.
이번 연구를 통해 심혈관 질환 시술 시간을 단축시키고 성공률을 높일 것으로 기대된다.
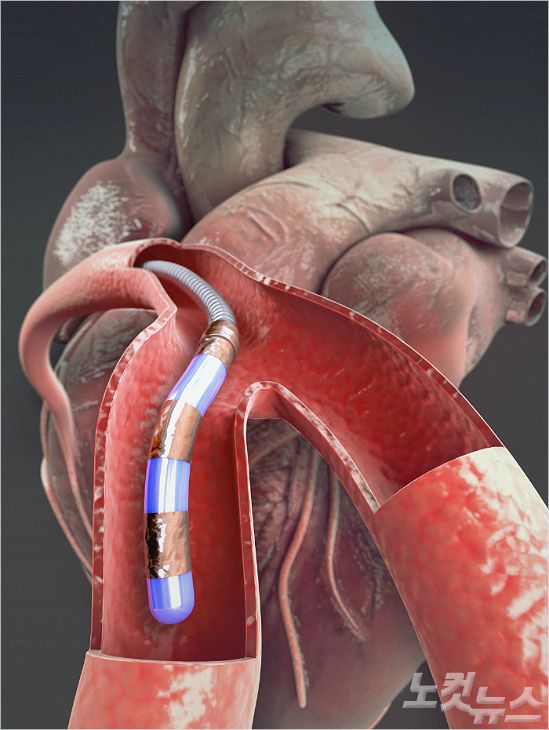 DGIST 로봇공학전공 최홍수 교수팀이 개발한 가이드와이어 부착형 마이크로로봇의 개념도
DGIST 로봇공학전공 최홍수 교수팀이 개발한 가이드와이어 부착형 마이크로로봇의 개념도
지금까지 막힌 혈관을 뚫어주는 관상동맥 중재술에 사용되던 가이드와이어는 시술자가 수동으로 방향과 위치를 제어하기 때문에 시술의 성공률과 속도는 시술자의 숙련도에 의존해왔다.
최홍수 교수팀은 유연하면서도 생체에 적합한 폴리머와 외부 자기장으로 방향과 위치를 제어할 수 있는 네오디듐 자석을 이용해 지름 500㎛, 길이 4mm 크기의 원통형의 마이크로로봇을 만들어 가이드와이어 끝부분에 부착했다.
외부 자기장 시스템으로 마이크로로봇을 제어해 원하는 방향으로 가이드와이어 조종이 가능하고, 마스터-슬레이브 시스템(Master-Slave System)3) 을 통해 직선운동이 가능한 가이드와이어 부착형 소프트 마이크로로봇으로 개발했다.
연구팀은 심장의 관상동맥을 모사한 3차원 혈관 모형에서 원하는 부위에 도달하는 실험도 성공했으며 세포 생존 실험을 통한 마이크로로봇의 생체적합성도 확인했다.
DGIST 로봇공학전공 최홍수 교수는 “가이드와이어 부착형 마이크로로봇을 이용하면 시술자의 경험에 의존하던 기존 방법과 비교해 질병의 원인인 부분을 정확하고 빠르게 찾아 안정적으로 시술할 수 있어 심장 질환 시술 시간을 단축시키고 성공률을 높일 수 있다”고 말했다.
한편, 이번 연구 결과는 로봇연구 분야 최고 국제학술지 ‘소프트 로보틱스’ 13일자 표지논문으로 게재됐으며 산업통상자원부와 과학기술정보통신부의 지원으로 수행됐다.