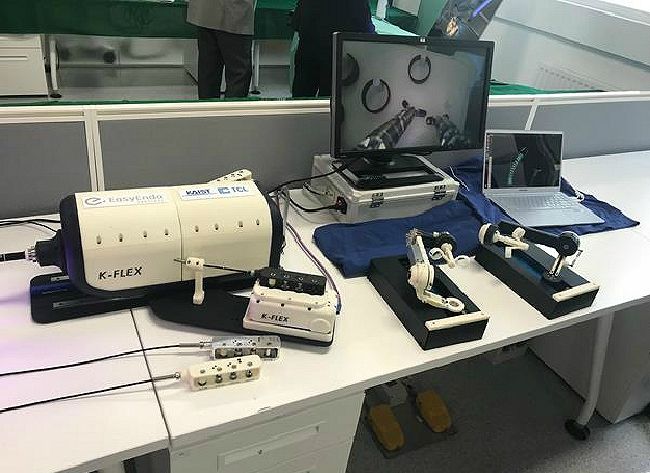
 '케이-플렉스(K-FLEX)'시스템 (사진 = KAIST 제공)
'케이-플렉스(K-FLEX)'시스템 (사진 = KAIST 제공)
국내 연구진이 유연한 내시경 수술로봇을 입이나 항문 또는 요도 등에 삽입해 몸속을 관찰하면서 초소형 로봇팔을 원격 조종해 수술하는데 성공했다.
한국과학기술원(KAIST)은 기계공학과 미래의료로봇연구단이 원격 내시경 수술로봇을 개발해 동물 실험을 성공적으로 진행했다고 16일 밝혔다.
케이-플렉스(K-FLEX)란 이름의 이 로봇은 입, 항문, 요도 등 우리 몸에 존재하는 통로를 따라 뱀처럼 유연하게 삽입할 수 있는 게 특징이다.
몸속을 자유롭게 관찰하다가 이상 징후를 발견하면 손가락처럼 생긴 초소형 로봇 팔이 나와 수술을 진행한다.
수술 도구가 곧아서 피부를 째거나 잘라야 하는 기존 수술로봇과는 완전히 다른 개념이라고 KAIST 측은 설명했다.
눈에 보이지 않는 신체 내부 절개만으로 수술할 수 있어 세균 감염이나 합병증 등 위험을 줄일 수 있다.
연구팀은 강한 소형 관절 기술도 로봇에 접목했다. 기존 장비보다 절반 가까이 크기를 줄이면서도 초소형 로봇 팔이 내는 힘을 두 배 이상 끌어 올렸다.
지난달 17일에는 돼지 담낭을 절개하는 실험을 탈 없이 마무리했다.
다양한 방향과 각도로 휘어지는 유연 내시경 수술로봇을 돼지 배를 통해 삽입하고서 병변이 있는 간과 담낭으로 접근시켰다.
이후 직경 3.7㎜의 소형 수술 도구가 간을 젖히며 수술을 위한 시야 확보를 한 뒤 간과 담낭 사이를 절제했다.
모든 수술 과정은 내시경 앞부분 카메라를 통해 송출된 돼지 신체 내부를 살피며 원격 조종 장치를 통해 진행했다.
연구를 총괄한 권동수 교수는 "국내 최초로 유연한 내시경 로봇을 살아있는 동물 복강 안에서 작동시켜 실제 수술 단계까지 진행한 것"이라며 "임상 적용 가능성을 확인했다는 의미가 있다"고 말했다.
연구팀은 지난 6월 29일 영국 런던 임페리얼 칼리지에서 열린 '서지컬 로봇 챌린지 2018'(Surgical Robot Challenge 2018)에서 베스트 애플리케이션 어워드와 오버롤 위너 상을 받기도 했다. 케이-플렉스 연구는 한국연구재단 지원을 받아 수행했다.